5 DOF Robot Arm
Robot Kinematics and Dynamics
Fall 2019
Language: MATLAB
In this class, we did a deep dive into robot maneuverability, especially as it relates to inverse kinematics.
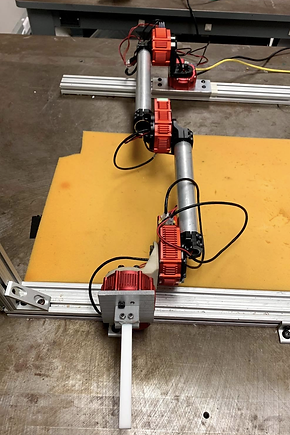
As a final project, we were provided with a 5 Degree of Freedom arm, created with HEBI revolute actuators. The challenge was getting the long white end effector to follow the cut out path in the acrylic. We were provided with critical coordinates along the path. In the video shown above, we were provided with corners. Given those coordinates, we interpolated between them to find a finer set of waypoints.
With the interpolated waypoints, inverse kinematic calculations are run to find the needed joint positions from the desired end effector location. Despite the slow movement of the robot, many precise calculations occur to send the robot end effector to the correct position with enough precision to fit through the small gap. All five of the joints are carefully programmed so that the end effector can make it through the path. Code was written in MATLAB.